3D Semantic Segmentation
Semi-supervised urban LiDAR point cloud segmentation on the city of Turin
Introduction
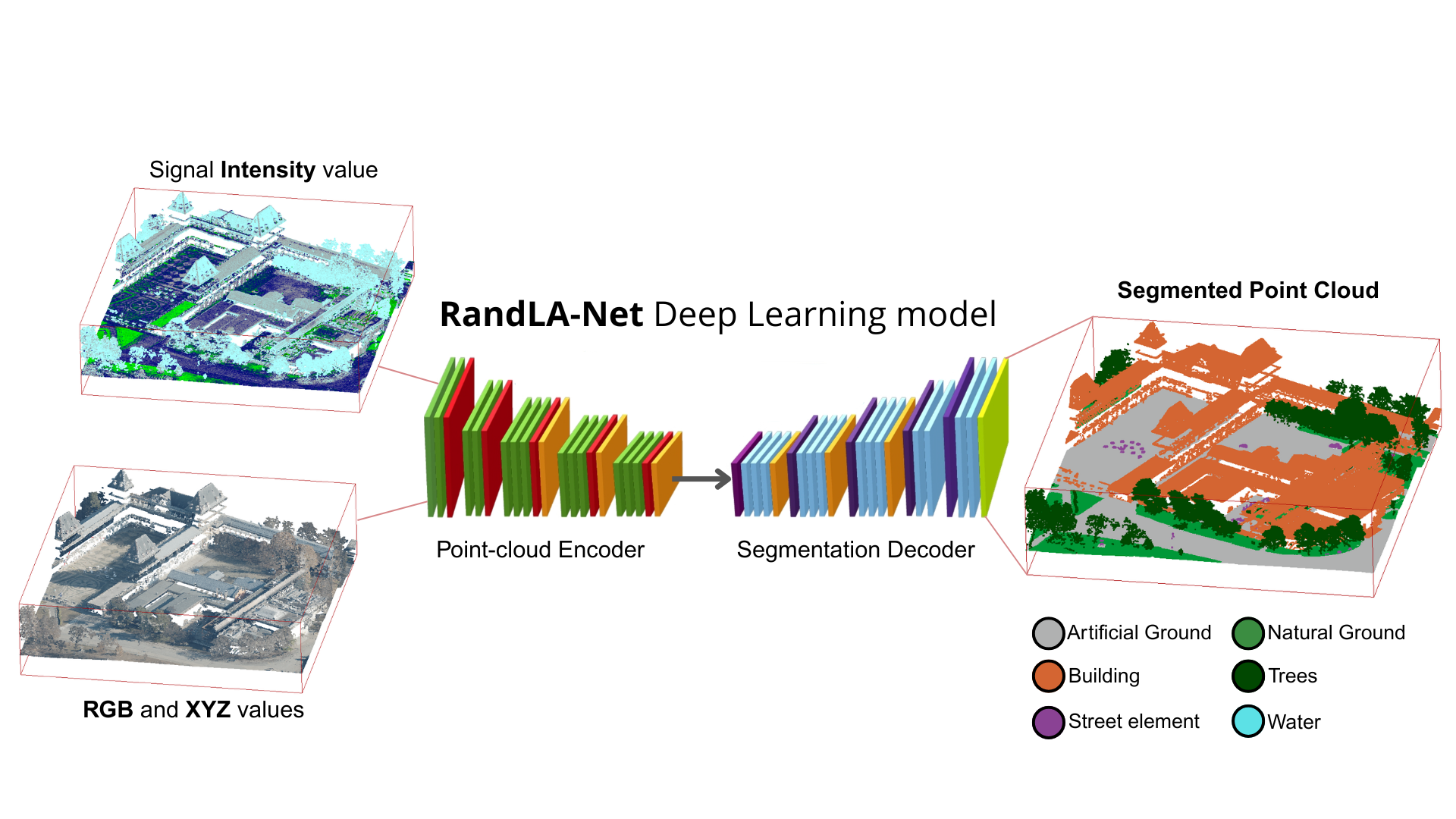
3D semantic segmentation plays a critical role in urban modelling, enabling detailed understanding and mapping of city environments. To address the challenge of label scarcity in this domain, we introduced Turin3D: a new aerial LiDAR dataset for point cloud semantic segmentation. The dataset covers an area of around 1.43 km² in the city centre of Turin, acquired in January 2022, containing almost 70M points.
Due to the complex and time-consuming nature of manual point cloud annotation, the training set relies on soft labels generated automatically, while the validation and test sets feature precise manual annotations for reliable evaluation. This structure makes Turin3D particularly valuable for developing and evaluating self-supervised and semi-supervised learning techniques in outdoor urban environments.
Key Features
- Extensive Coverage: Comprises 57 blocks covering approximately 25,000 m² each, totaling almost 70M points across the city centre of Turin.
- Taxonomy: Points are classified into 6 semantic classes crucial for urban understanding: Undefined, Soil, Terrain, Vegetation, Building, Street element, and Water.
- Annotation: High-quality, precise manual annotations (hard labels) to ensure rigorous and robust model evaluation.
Dataset
The Turin3D dataset provides a detailed 3D representation of an urban environment and is designed for researchers and practitioners in 3D semantic segmentation, urban planning, and autonomous systems.
The dataset is publicly available for download on Hugging Face: 👉 Download Turin3D Dataset
Technologies Used
- RandLA-Net: Random Sampling and Local Feature Aggregation for large-scale point cloud segmentation (Hu et al., 2020)
- Point Transformer: Self-attention-based architecture for 3D point cloud understanding (Zhao et al., 2021)
- SparseConv (Sparse Convolution): Efficient 3D sparse convolutional network for volumetric point cloud processing (Graham et al., 2018)
Live Demo
Explore the dataset and visualize the 3D point clouds directly in your browser.
Try it out
Publications
The dataset, benchmarking, and semi-supervised learning strategies were introduced in the paper accepted at CVPRW2025 - USM3D:
Turin3D: Evaluating Adaptation Strategies under Label Scarcity in Urban LiDAR Segmentation with Semi-Supervised Techniques Luca Barco, Giacomo Blanco, Gaetano Chiriaco, Alessia Intini, Luigi La Riccia, Vittorio Scolamiero, Piero Boccardo, Paolo Garza, Fabrizio Dominici arXiv:2504.05882
References
2025
- CVPRTurin3D: Evaluating Adaptation Strategies under Label Scarcity in Urban LiDAR Segmentation with Semi-Supervised TechniquesIn Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , 2025